《Nature》之后再发《Science Robotics》!贺曦敏团队:用于人造“章鱼哥”的光热响应水凝胶体感致动器
作者|高分子科学前沿 来源|高分子科学前沿(ID:Polymer-science)
章鱼作为一种软体动物,圆鼓鼓的身体一般很小,有着八条感觉灵敏的触手,可以轻松伸长缩短,抓取和移动重物。它们还十分善于伪装,受惊后几秒钟内变色,且变形能力绝佳,能轻松钻进贝壳或不规则容器中寄居。

生物体这种能够根据周围环境变化实时调控行为的能力是有别于人造材料最重要的特征之一。一般需要体感受器(机械感受器)局部感应外界刺激,并通过反射弓或神经肌肉系统传输信号,同时效应器(肌肉)提供体感反馈。机器人技术的最终目标之一是通过模仿生物体感系统中的受体和效应器来实现类似的感觉运动能力,以完成同步感知和主动运动。这就要求高灵敏、低延迟的传感器和执行器集成在同一体系中。使用更易加工和更贴合的软材料制造软机器人,不仅能够监控物体的粗糙度、柔软度和温度,而且能够通过算法控制抓握物体,为传感-致动一体化提供了可能。美国加利福尼亚大学洛杉矶分校贺曦敏教授带领研究团队开发了一种基于导电聚合物双网络水凝胶的柔性体感制动器,该材料能够像章鱼触手般伸长、缩短、感知和抓握物体,通过一种闭环算法执行反馈的多种命令。研究成果以Somatosensory actuator based on stretchable conductive photothermally responsive hydrogel为题发表在《SCIENCE ROBOTICS》上。

【柔性体敏致动器的设计与制备】
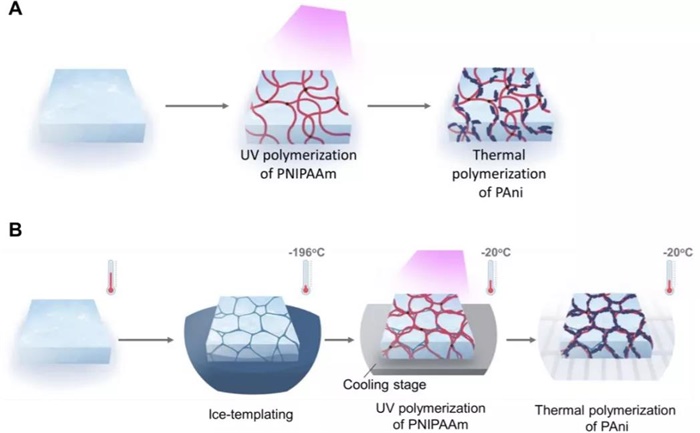
导电水凝胶由聚(N-异丙基丙烯酰胺)(PNIPAAm)和聚苯胺(PAni)互穿的双网络聚合物组成,可将光/热驱动和压阻传感合二为一。PNIPAAm赋予体系热响应驱动的能力及机械柔韧性,而黑色导电性PAni则同时充当了光热传感器和压阻传感器。一方面,材料变形时会影响PAni导电网络,从而引起电阻变化。另一方面,当温度升高到PNIPAAm的下临界溶液温度(LCST)以下时,PNIPAAm表现出明显的温度驱动的收缩,PAni网络变得更加紧密,因而水凝胶的电阻率将大大降低。
为了使两种不相容的聚合物充分混合以形成在微米/纳米级上密集堆积的导电聚合物链,对聚合工艺进行了优化。先将混合溶液在液氮(-196°C)下快速冷冻以形成冰模板,然后在-20℃时分别诱导PNIPAAm的紫外光聚合以及PAni的冷冻聚合,如下图B所示,所制备的凝胶称为ITUC凝胶,并表现出独特的优势:(i)整个体系中导电(传感)和刺激响应(应激)组分以分子水平均匀分布,保证了连续的电子传导通路和高灵敏度;(ii)零下聚合反应抑制了导电聚合物(CP)纳米聚集体的过度生长,并且冰模板法使得CP堆积致密化,因而材料强韧可拉伸;(iii)水凝胶双开口的微结构赋予体系高的水扩散能力,因此可以被快速激活,迅速响应。与液相合成的水凝胶相比,材料电导率提升了三个数量级,机械模量增强386%。
【水凝胶的光/热制动和感应性能】
作为致动器,水凝胶可以响应刺激迅速变为任意形状和大小,并且响应速度大大提高(比常规PNIPAAm快30倍),体积变化率高,在1分钟内可收缩至49.7%。由于PAni的光热特性,复合水凝胶还可以通过光热机制实现光制动。在近红外光照射下,ITUC凝胶可以有效收缩和提起其干聚合物重量的171.6倍的物体。当NIR光以任意角度照射在水凝胶条上时,水凝胶会向入射光方向弯曲,跟踪光照。这种方向性,不对称的运动源于水凝胶两侧的温度梯度,受照侧的温度迅速升高到LCST之上,而阴影侧的温度仍保持低于LCST,因而受照侧局部收缩,复合凝胶整体弯曲。当光熄灭时,水凝胶可以迅速恢复到原始的未变形构型。此外由于PVA层不响应温度变化,将PVA层与ITUC凝胶层组合,双层凝胶会向ITUC侧弯曲,组合形成的“触手”可以在温度控制下提升重物,如下图E,这表明复合水凝胶能容易地与其他特性的材料组合,完成复杂动作。
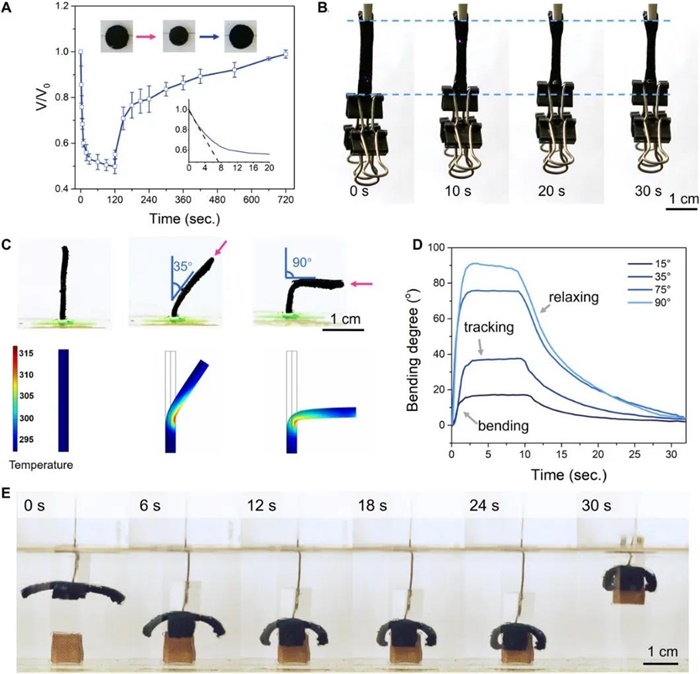
(A)在热水中的体积收缩(40°C)和恢复(室温下)。(B)ITUC凝胶在空气中近红外光照射提升重物。(C)ITUC凝胶的光致变形。(D)水凝胶跟踪不同倾斜角度的红外光。(E)带有PVA层的ITUC凝胶在45°C的热水中抓取物体。
ITUC水凝胶具有高导电性和可拉伸性,能够在机械形变时充当压阻应变传感器。在70%拉伸应变下,GF为2.3,灵敏度比PEDOT / PVA和石墨烯/ PAAm凝胶传感器要高。这得益于冰模板诱导的均匀连续的导电聚合物网络。水凝胶还可以检测弯曲和压缩,表现出其作为曲率传感器和触觉(触觉)传感器的潜力。
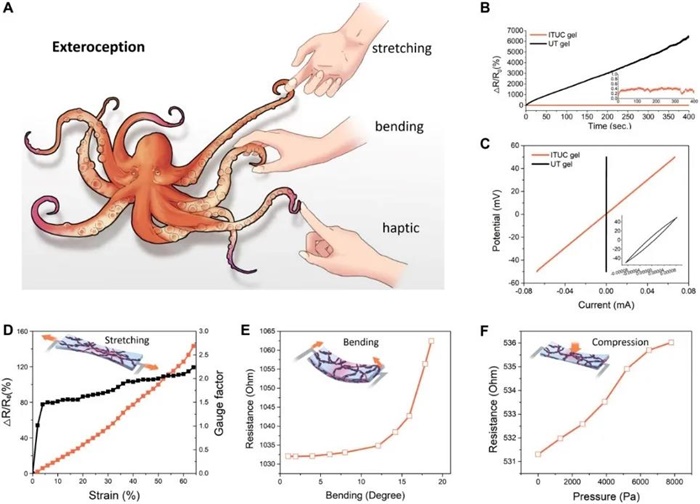
(A)不同感知示意图。(B)凝胶随时间变化的电阻。(C)ITUC凝胶和UT凝胶在-50至50 mV之间的电流-电压扫描曲线。(D)在拉伸过程中凝胶的电阻变化。(E和F)凝胶在弯曲和压缩下的电阻变化。
【水凝胶的体敏制动性】
文中实时监控复合水凝胶的主动制动行为,表明了人造水凝胶章鱼能够根据物体的尺寸,调整卷曲的弧度,从而“抓牢”重物,表现出像生物体一样感测环境-主动制动的行为。
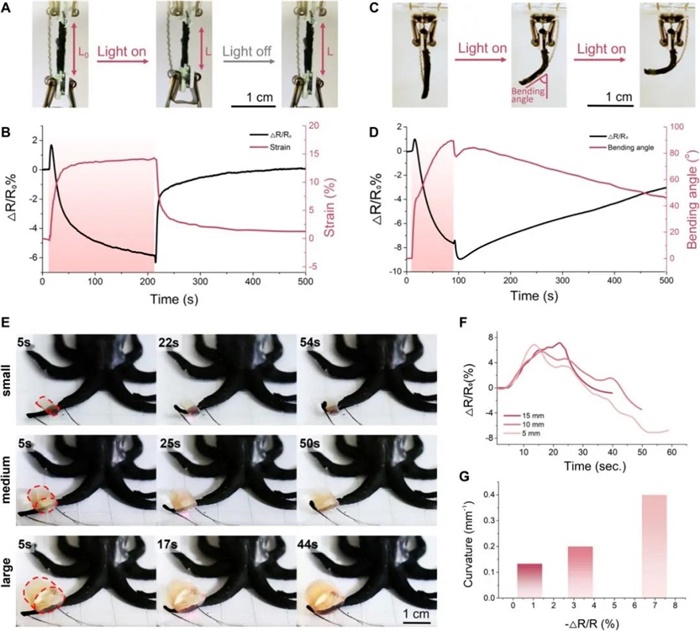
(A)近红外光下体感缩短和伸长。(B)电阻和应变随时间的变化。(C)近红外光下的体感弯曲。(D)电阻和弯曲角度随时间的变化。(E)人造章鱼识别形状的过程。(F)当包裹不同尺寸的物体时电阻的变化情况。(G)电阻变化和物体曲率的关系。
这得益于研究人员开发的一套闭环控制系统,可用于主动控制人工手臂的伸长/缩短,模仿了生物神经肌肉系统。该系统中神经冲动从受体向内传递至脊髓,然后向外传递至效应器,这与肌肉或腺体受激反应的过程非常相似。控制算法能够实时向控制器提供与尺寸变化有关的体感反馈信号,从而控制“触手”的收缩/松弛行为。
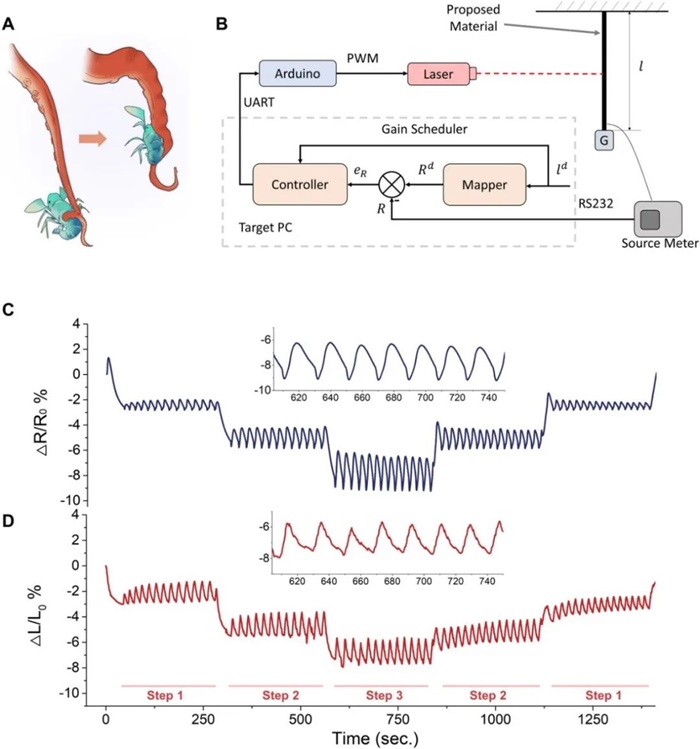
(A)水凝胶臂长度缩短控制的示意图。(B)闭环控制系统图示。(C)闭环调节期间相对电阻随时间的变化。(D)闭环调节期间相应的水凝胶臂应变与时间的关系,通过三个步骤逐步达到目标臂长(原始长度L0 = 25.0 mm,第1步L1 = 24.35 mm,第2步L2= 23.75毫米,而第3步L3 = 23.31毫米)。
【结论】
文中通过冰模板和低温聚合法成功制备了基于PAni –PNIPAAm的双网络复合水凝胶,有效地解决了导电聚合物水凝胶由于非均匀性和聚集导致的低电导率和不良感应等问题,将传感和驱动功能集成在一个材料上。这种体感制动器可与不同的智能材料结合,在保留每个组件功能的同时,协同实现感官致动所需的高机械和电气特性。该方法可用于制造具有多感官感知和移动性的微型机器人,有助于解决目前软机器人制备中存在的诸多挑战。
文章来源:Science Robotics 07 Apr 2021: Vol. 6, Issue 53, eabd5483.
DOI: 10.1126/scirobotics.abd5483
编者按:本文转载自微信公众号:高分子科学前沿(ID:Polymer-science)


本文作者信息
高分子科学前沿(学术公众号)
邀请演讲广告、内容合作请点这里:寻求合作
咨询·服务