斯坦福大学华人团队研发「新型无线仿生章鱼爪」,未来有望用于人体医疗检测

作者|机器人大讲堂 来源|机器人大讲堂(ID:RoboSpeak)
背景介绍
章鱼有八只触手,又被称作“八爪鱼”,这些触手可以单独或者配合通过变形完成各种不同的功能,如行走、游泳、防御、捕食等,这些惊人的功能为机械臂的发展提供了不一样的思路。相比于普通机器臂,模拟章鱼触手的仿生机械臂具有柔软的结构和灵巧的变形,不但可以适应不同的环境以及具有更好的抓取物体的能力,更是在与人类的交互中提供更好更安全的体验。充分的模拟章鱼触手的功能并智能辅助人类生活是科学家和工程师们一直以来孜孜追求的目标。
视频一:仿生机器臂模拟章鱼触手弯曲及捕食功能
斯坦福大学赵芮可教授团队(原俄亥俄州立大学)近日提出一种基于远程磁场驱动和Kresling型折纸结构单元的仿生软机械臂,并展望了其未来应用于内窥镜检查和导管插入等微型医疗设备的潜力。通过巧妙的磁化设计和精准的远程磁场控制,该机械臂系统可以实现包括万向弯曲(omnidirectional bending)、伸缩(deployment/contraction)和扭曲(twisting)在内的各种灵巧的变形模式,并展示了抓取和操作物体的能力。同时得益于无线磁场驱动带来的优势,该机械臂系统避免了常规电机或气泵驱动所带来的的庞杂管线,十分易于小型化和狭窄空间作业,特别适合人体内的一些应用环境。研究成果于近日以“Stretchable origami robotic armwith omnidirectional bending and twisting”为题发表在《美国国家科学院院刊》(PNAS)上,论文参与者还有佐治亚理工学院的Glaucio H. Paulino教授。
▍折纸结构实现磁场操控的伸缩和万向弯曲
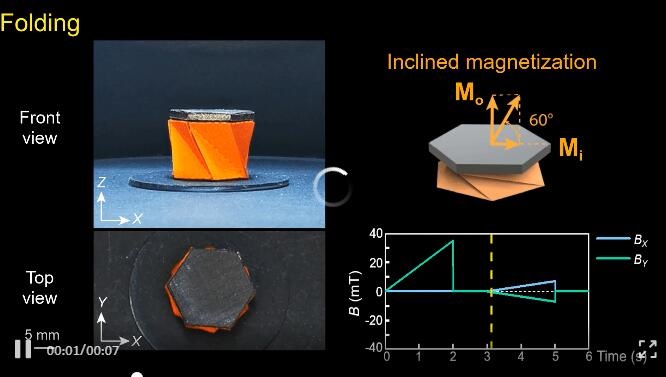
与常见的使用硅橡胶等软材料制作机械臂不同,研究团队选择柔顺的具有伸缩和弯曲特性的Kresling型折纸结构作为机械臂的基本单元。从图一A-C可以看出,该折纸结构可以通过分别施加解耦的面内和面外转矩实现伸缩或者弯曲,这两种转矩分量又可以通过设计单元上磁驱动器的不同磁化方向来施加,这里的面内和面外分量是相对于Kresling结构的顶面定义的。当施加同样的外加磁场,面内磁化分量可以提供面内转矩(图一E),而面外磁化分量可以产生面外转矩(图一H)。当磁驱动器同时具有面内和面外磁化分量(图一D),则Kresling单元可以通过磁场的精确控制分别实现伸缩以及万向弯曲(视频二)。

图一:磁驱动Kresling型折纸单元伸缩和万向弯曲变形的驱动原理
视频二:磁驱动Kresling型折纸单元实现伸缩和万向弯曲变形
▍模块化设计满足不同应用需求
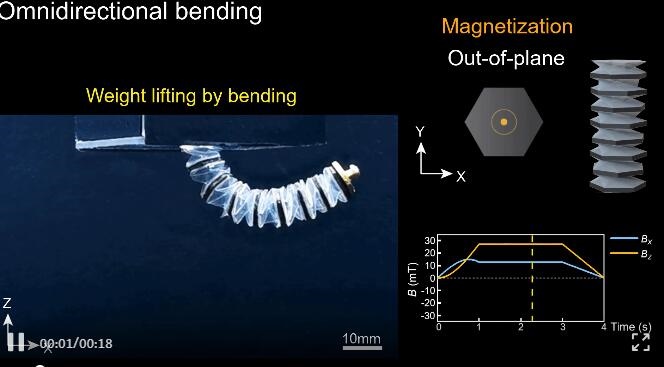
然而由于Kresling单元在展开状态时无法弯曲且单个单元弯曲角度有限,因此团队设计了一系列多单元结构的机械臂来展示增强的集成变形特性,机械臂上各单元磁驱动器的磁化方向均经过特殊设计来满足相应的设计目标,例如视频三中所示的四单元Kresling机械臂,底部单元的磁驱动器具有面外磁化方向,负责机械臂的整体万向弯曲,而上方的三个单元具有方向各异的面内磁化方向,主要负责机械臂的伸缩。经过巧妙设计的机械臂在三维磁场的控制下可以同时实现万向弯曲和伸缩。

视频三:四单元Kresling机器臂的万向弯曲和展开
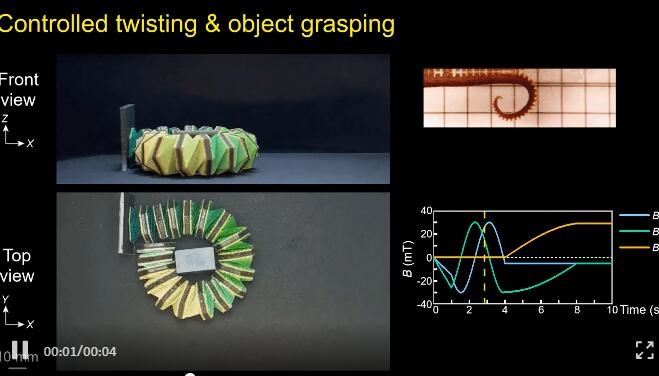
基于Kresling折纸单元的机械臂具有十分灵活的设计自由度,可以通过定制Kresling单元数量及磁驱动器的磁化方向,满足不同的应用场合和目标功能需求。为了实现更加复杂的变形模式以及更好的模拟章鱼触手的功能,团队分别设计了十二单元和十八单元的机械臂,其中十二单元仿生机械臂的磁驱动器均为面内磁化,在精准的磁场控制下,该机械臂模拟了章鱼触手可控伸缩、弯曲及扭曲等不同变形模式(视频四)。而十八单元仿生机械臂的磁驱动器均为面外磁化,除了可以模拟章鱼触手的不同弯曲形态外,还展示了与触手捕食功能相似的抓取和操作物体的能力(视频一)。

视频四:十二单元Kresling仿生机器臂模拟章鱼触手的可控伸缩、弯曲及扭曲等变形模式
▍小型化设计目标医疗场景应用
Kresling机械臂采取无线磁场控制,功率源与驱动器无任何物理连接,因此该系统十分易于小型化和在受限空间内应用。一些医疗场景,如内窥镜手术,操作空间十分有限,且需要导管前端具有灵活和精准的定位控制,而这些控制通常不易从远端施加或容易对病人造成损伤,磁驱动Kresling机械臂的柔顺结构和远程操控可以很好的弥补这些缺点。如图二所示的小型化机械臂具有和医用导管相近的尺寸,通过伸缩和万向弯曲等灵巧变形实现物体操控(视频五),未来有望实现在人体内狭窄环境下的精确作业。
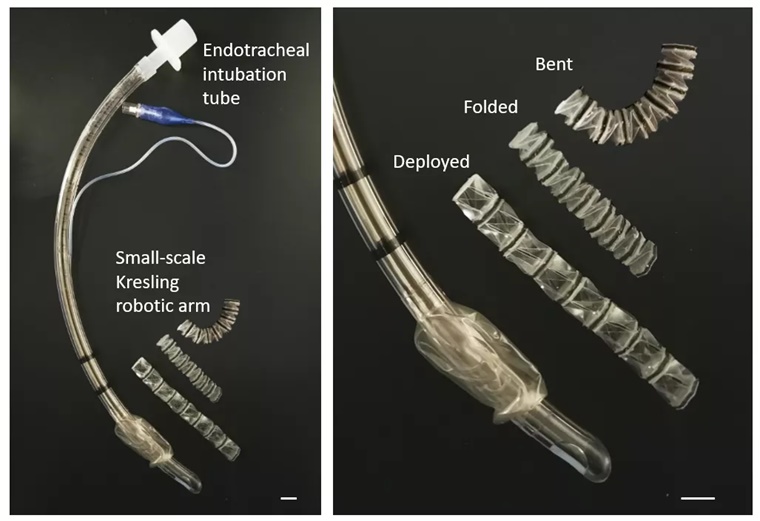
图二:小型化Kresling机械臂与医用导管对比示意图
视频五:小型化Kresling机械臂通过伸缩和万向弯曲实现物体操控
▍团队介绍
该工作由斯坦福大学软智能材料实验室的(原俄亥俄州立大学Soft Intelligent Materials Laboratory,SIMLab链接: https://zhaolab.stanford.edu/)博士生吴帅,博士后迮弃疾为共同一作,其他重要作者包括俄亥俄州立大学硕士生戴继泽,加州大学伯克利分校的硕士生孙悦(原SIMLab本科生助研)在样品制备方面提供了大力帮助。
论文链接:
https://www.pnas.org/content/118/36/e2110023118
编者按:本文转载自微信公众号:机器人大讲堂(ID:RoboSpeak)


本文作者信息
机器人大讲堂(科技自媒体)
邀请演讲广告、内容合作请点这里:寻求合作
咨询·服务

