王中林院士AFM:仿生毛须!可增强机器人的皮肤触觉
作者|高分子科学前沿 来源|高分子科学前沿(ID:Polymer-science)
动物具有许多不同形式的身体感官来感知外部环境,例如视觉、听觉、嗅觉、味觉和触觉。通过模仿动物视觉原理,当前的机器人主要依靠摄像机和图像识别技术来获取外部信息。但是,随着计算机、微电子学和信息处理技术的飞速发展,人们逐渐要求机器人能像人一样,更准确、更快速地感知环境信息,因为这对它们在不确定和复杂条件下的应用至关重要。例如,他们要能在低能见度条件下安全航行,避开障碍物并探索狭窄的空间。因此,仅依靠视觉传感器是不够的,寻求补充的传感策略对于扩展智能机器人的应用领域和适应性至关重要。在自然界中,有许多生物生活在黑暗、狭窄、浑浊等极端环境中。他们可以了解自己的环境,并使用触觉来识别和捕获猎物。人类可以模仿他们的环境适应策略,以解决类似极端条件下的信息检测问题。这些生物都使用结构相似的传感器来感知环境,也就是说,有明显的触杆或突起,例如鱼类的侧生线以及鳍足类和啮齿类动物的毛须。它们可以通过感测探针杆的应变来接收外部流体信号或碰撞信号。触须探测器已经发明了很多年,主要用于遥控车辆和两栖机器人来营救、检测污染物和探索浑浊的水环境。但是,传统的触须探测器主要基于压阻、压电、光学和磁性原理。这些传感器有其自身的缺点,例如,即使在非工作状态下,能量消耗也很大,重量大,易受干扰,成本高且难以小型化、排列和封装,这阻碍了这些技术在机器人技术领域的广泛应用。
最近,作为一种新的机电转换技术,摩擦纳米发电机(Triboelectric nanogenerator,TENG)被发明出来。由于其对机械刺激的高灵敏度,TENG不仅可以用于能量收集,而且可以作为出色的自供电机电传感器。目前已经出现了很多基于TENG的传感器,例如振动、声音、液位、角度和触觉传感器。但是,由于TENG的电容性阻抗,传统的数据采集电路无法与它们匹配,这限制了基于TENG的传感器的商业可用性。除此之外,大多数触觉技术的发展主要集中在电子皮肤上,而开发用于环境感知的无电池电子毛须的工作却相对较少。而且电子皮肤(e-skin)在重复使用后,容易被弄脏、损坏和干扰,这极大地限制了其在机器人技术中的实际应用。
鉴于此,王中林院士团队创造性地设计了可弯曲的仿生毛须机械感受器(biomimetic whisker mechanoreceptor,BWMR),用于机器人触觉传感。该传感器具有易于制造、成本低、灵敏度高和稳定性好的优点。在此基础上,作者还设计了基于静电计原理的信号采集电路,以构建用于机器人技术和工业应用的触觉传感系统。BWMR有望被开发成多功能的扰动接收器阵列,可广泛用于环境监测、参数指示和工业设备感测以及机器人导航的触觉技术、猎物跟踪和危险规避。该研究以题为“Biomimetic Hairy Whiskers for Robotic Skin Tactility”的论文发表在最新一期《Advanced Materials》上。

【仿生毛须机械感受器原理】
作者通过模仿动物使用基于毛发传感器探索环境的方式,设计了可弯曲的仿生毛须机械感受器(biomimetic whisker mechanoreceptor,BWMR)用于机器人触觉传感。由于摩擦纳米发电机技术的优势,BWMR无需电源即可将外部机械刺激转换为电信号,这有利于其在机器人中的广泛应用。在毛须的初始垂直状态下,两个电极上的电位相等。当毛须在外力作用下向右摆动时,毛须的根部将在杠杆效应的作用下移向左侧电极,从而打破两个电极之间的电位平衡并带动正电荷从右电极到左电极。产生的正信号可以通过静电计电路获取。当毛须向左偏转时,左电极上的正电荷将回流,产生负电信号。BWMR的工作模式是通过有限元模拟确定的。毛须的偏转方向和幅度可以分别从所转移电荷的符号和大小获得。微弱的信号通过毛须的杠杆作用放大,并被BWMR的毛囊感知,对外部刺激表现出超高的灵敏度,低至1.129 µN,该传感器的分辨率还可以通过增加毛须长度来进一步改善。如果将BWMR排列在机器人上,则电信号可以通过电荷收集电路获取,并由微程序控制单元(MCU)处理,以实现机器人的全面环境检测。同时,检测到的信号还可以通过WIFI传输到中枢大脑,从而可以统一调度机器人集群,并通过分析采集到的数据来实现机器人之间的协调与协作(图1e)。
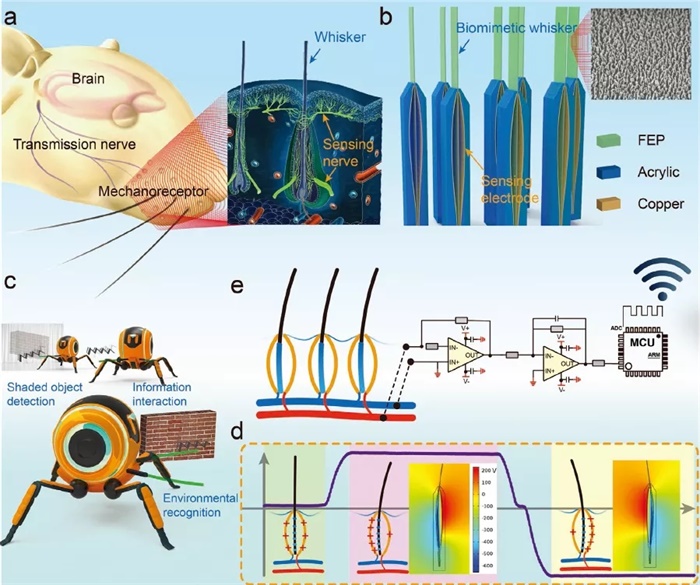
图1. 仿生毛须机械感受器的仿生概念、应用和原理。a)动物毛须感觉系统的示意图,以及毛须机械感受器的局部解剖结构。b)BWMR的结构设计示意图。c)BWMR在阴影物体检测、信息交互和机器人环境识别中的应用。d)BWMR在不同毛须状态下,电荷获取电路所获取的信号的示意图。e)人造毛须系统:由BWMR阵列、电荷采集电路、MCU和无线发射电路组成。
【仿生毛须机械感受器的应用】
由于TENG技术的能量转换能力,BWMR不需要额外的电源,从而极大地促进了其在机器人技术中的分布式应用。挤压的毛须通过其杠杆作用,能够区分1.129 µN的弱环境干扰,这赋予了机器人灵敏的触觉能力以进行环境检测,与电子皮肤相比,有效地提高了设备寿命、稳定性和抗干扰性能。此外,作者通过集成BWMR和无线静电计DAQ电路来构建触觉系统。通过采用峰值计数策略,作者证明了一种实时机电一体化指示系统,可用于工业设备中的直接参数指示和远程同步监视,具有高可靠性和稳定性。另外,作者还构思并组装了一种机器人触觉传感系统,以展示其在机器人应用中的功能性。经过人工智能、机器识别和其他信息处理技术的信号处理后,该机器人可以获得非凡的触觉导航能力和很强的环境适应能力。该机器人可用于环境识别、物体表面形貌收集,周围物体和地面环境检测以及自步态分析。BWMR的结构,尺寸及其信号采集方法可以在未来的工作中得到进一步改进。此外,BWMR还具有可靠、低成本、节能的特点,可用于制作耐用的机电指示器,能在许多工业设备中用于参数指示和传感。它可以解决传统机械指标与电子控制系统的连接问题,这是人工智能和大数据分析的基础。这项工作展示了BWMR的广泛应用,并展示了基于TENG的传感器在满足机器人对极端环境的高度适应性方面的巨大应用前景。
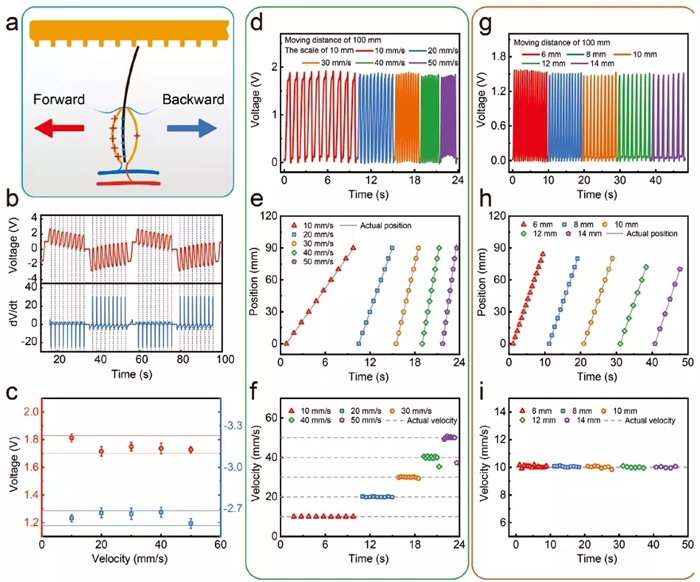
图2. 外部刺激下BWMR的电学特性。a)向前和向后刺激应用的示意图。b)当毛须在正向和反向扫描过程的两个循环中滑过刻度尺时,开路电压(VOC)和相应的dV / dt信号。c)不同扫描速度下VOC的幅度变化。红色和蓝色点分别表示正向和反向扫描过程中的电压幅度。d)以不同速度向前扫描时,BWMR的VOC。e)根据(d)中的信号峰值计算的位移和f)实时速度,并与不同扫描速度下的实际值进行比较。g)当以相同速度向前扫描不同规模密度时,BWMR的VOC。与实际值比较,计算出的h)位移,以及从(g)得到的i)实时速度。
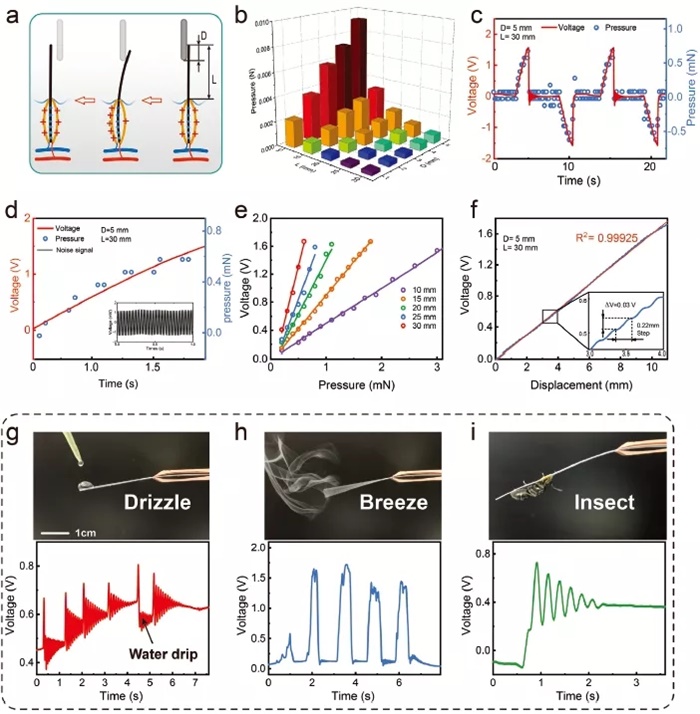
图3. 承受刺激力时BWMR的相应特性。a)向BWMR施加压力的示意图。毛须的长度L和接触长度D决定了施加在毛须上的最大压力。b)最大施加压力与毛须长度L以及接触长度D之间的关系。L越短和D越长,产生的施加压力就越大。c)当在毛须上施加周期性力时,BWMR的实时VOC。施加的压力由市售压力传感器实时测量,分辨率为0.1 mN。d)BWMR和商用压力传感器之间的灵敏度比较。插图是噪声信号的波形。根据噪声信号的幅度和BWMR的VOC,最小分辨率可以计算为1.129μN。e)对于不同的L,VOC与压力之间的线性关系。f)随着毛须尖端位移的增加,VOC的变化。g–i)BWMR对微弱的环境干扰(如毛毛雨(g),微风(h)和昆虫爬行(i))的电压响应。

图4. BWMR在机器人技术中的应用演示,该机器人用于环境和障碍物识别以及物体表面形貌扫描。a)配备有BWMR系统的自动导引车(AGV)的照片,该系统由一组BWMR传感器和一个静电计DAQ板组成。该板上有两个静电计模块,分别从左右BWMR传感器获取电荷信号。b)静电计DAQ板和AGV系统的示意图。c)策略和轨迹,d)自动控制程序,以及e)在自动避障过程中从静电计DAQ板实时获取传输的电荷信号。f)机器人汽车的照片,g)获取的表面形貌数据,h)在对象表面形貌的扫描过程中经过伪Wigner-Ville变换后的信号。

图5. BWMR在机器人技术中用于振动检测和道路状况感知的应用演示。a)配备BWMR系统的四足机器人的照片,该系统由BWMR传感器和静电计DAQ板分别构成腿和身体。插图显示了对振动频率的响应特性以及机械手腿的放大图。b)当毛须上施加不同频率的振动时,BWMR收集的电压信号的频谱图。c)使用脚上的振动接收器捕获猎物的蜘蛛的示意图。d)仿生机器人感知接近物体的照片,以及e)BWMR实时获取的信号。f)蜘蛛的照片,可通过感知其脚上的压力来防止跌倒。g)仿生机器人感知其工作步态和路面状况的照片,以及h)机器人行走时实时获取的信号。
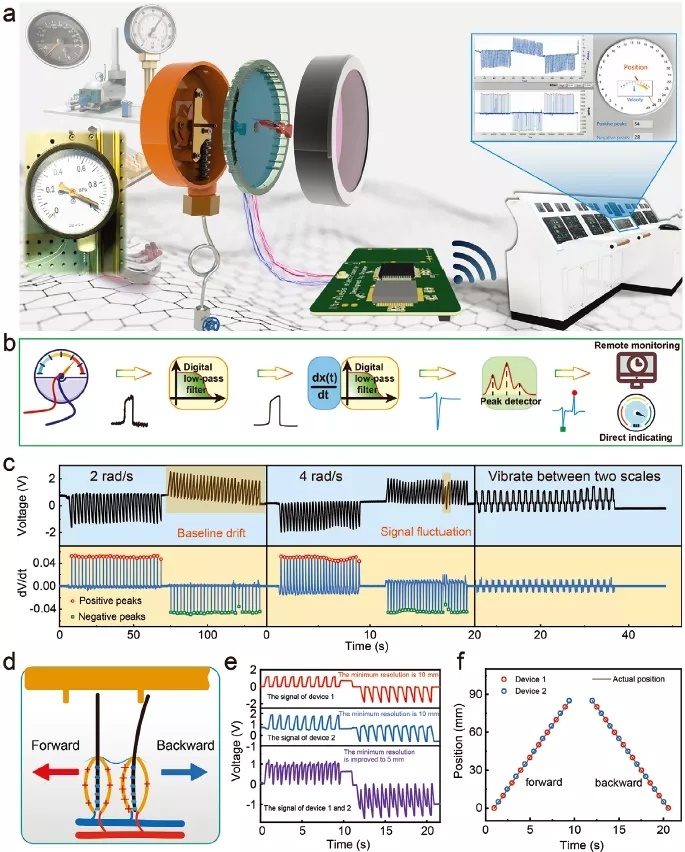
图6. BWMR在工业领域中的应用,用于直接显示和远程监视关键参数。a)用于远程监控和直接显示速度、压力和位移的机电一体化指示系统的示意图。b)带有BWMR指针的机电式仪表的示意图,用于远程获取其旋转角度。经过过滤和微分后,可以对dV / dt轮廓的负峰值和正峰值进行计数,以获取指针位置。c)当指针以不同的速度旋转并在两个刻度之间振动时,BWMR仪表的VOC和dV / dt变化。正峰值和负峰值分别是顺时针和逆时针旋转信号。电压信号存在基线漂移和信号波动,但经过差分处理后,信号更加稳定,具有更高的抗干扰能力。d)通过使用多个BWMR指针提高了分辨率的示意图。e)来自指针1,指针2和两个并行连接的指针的VOC信号。利用两个BWMR指针可使峰值密度加倍。f)根据两个并行设备的信号峰值数量计算出的指针位置,并与实际值进行比较。
总结:作者开发了一种易于制造、高度灵敏且自供电的BWMR传感器,以及基于静电计原理的信号采集电路,以构建用于机器人技术和工业应用的触觉传感系统。该系统可用于环境识别,物体表面形貌收集,周围物体和地面环境检测以及自步态分析。此外,BWMR还具有可靠、低成本、节能的特点,可用于制作耐用的机电指示器,可在许多工业设备中用于参数指示和传感。BWMR有望被开发成多功能的扰动接收器阵列,可广泛用于环境监测、参数指示和工业设备感测以及机器人导航的触觉技术、猎物跟踪和危险规避。
原文链接:
https://onlinelibrary.wiley.com/doi/10.1002/adma.202101891
编者按:本文转载自微信公众号:高分子科学前沿(ID:Polymer-science)


本文作者信息
高分子科学前沿(学术公众号)
邀请演讲广告、内容合作请点这里:寻求合作
咨询·服务