观察犀牛甲虫,启发出一篇《Science》!吉林大学孙霁宇《Science》点评
作者|高分子科学前沿 来源|高分子科学前沿(ID:Polymer-science)
飞行昆虫大多生活在茂密且复杂的森林环境中。在这种复杂的自然条件下,虽然昆虫可以使用其感官系统来避开障碍物,但昆虫的翅膀碰到障碍物的可能性很大,严重时会影响其飞行性能,甚至造成翅膀损伤。为了保护其脆弱的翅膀,自然进化的选择迫使昆虫使用生物力学的策略来保护自己:静止时,昆虫会将翅膀沿着身体折叠,将后翅塞在坚硬的鞘翅中,以减少损坏的风险。当需要飞行时,后翅会通过拍打力完全展开,折痕锁定在适当的位置,并用作平坦的膜片以产生空气动力。
受飞行昆虫的启发,越来越多的科学家开始聚焦于从研究生物学原型到新型仿生机器人或微型飞行器的研究,并取得了巨大的进展。例如,基于瓢虫的翅膀静脉启发的微型飞行机器人可以实现滑行和跳跃功能;基于昆虫翅膀的折叠机制,科学家设计了可展开机翼的微型无人机等等。

图1. 受犀牛甲虫启发,Phan 和Park设计的微型飞行机器人
近日,首尔建国大学Hoang Vu Phan 和Hoon Cheol Park对飞行犀牛甲虫(Allomyrina dichotoma)的后翅折叠和展开机理进行了详细的研究,发现犀牛甲虫后翅具有折纸状的褶皱,可以在遭遇碰撞时迅速塌陷,然后弹回,从而起到减震器和稳定器的作用,恢复稳定飞行。受这种自然减震器的概念启发,Phan 和Park设计出一种新型的甲虫仿生微型飞行机器人,它能在发生碰撞后,继续飞行而不会受到任何损坏。研究成果以“Mechanisms of collision recovery in flying beetles and flapping-wing robots”为题,发表在《Science》上,建国大学Hoang Vu Phan 为文章的第一作者和通讯作者,Hoon Cheol Park为共同通讯作者。

犀牛甲虫在飞行过程中翅膀折叠机制
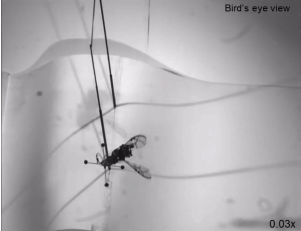
为了进行研究, Phan和Park使用高速摄像机观察了八只犀牛甲虫的飞行行为。观察发现,犀牛甲虫起飞前,首先打开其鞘翅,以促进翅膀底部的后翅能够在边缘关节处保持折叠形态(MJ,图2A)。随后,后翅开始拍打并在两次拍打节拍中完全展开。后翅展开的过程通常在上冲程期间,并在并在背侧冲程反转时达到完全伸展的状态,此时翅膀的角加速度达到最大值(图2 B-D)。由于飞行时的气流,展开过程完全沿着自然的折叠边缘发生。

图2. 甲虫利用机翼惯性作用拍打其后翅的飞行机制。
随后,作者在实验室中模拟了甲虫复杂的自然飞行环境并观察其飞行碰撞中的反应。研究发现,当甲虫以每小时2公里的速度击中障碍物上的细条时,如果撞到翅膀的中部后,甲虫会通过移动其腿部和另一只翅膀来稳定飞行。但是,如果翅膀尖端撞到障碍物,甲虫的翅膀就会稍微折叠起来,吸收冲击力。仅仅四毫秒后,它又再次展开,让甲虫几乎没有旋转就回复稳定飞行了。进一步对甲虫翅膀的解剖结构的研究发现,原来犀牛甲虫的翅膀中具有折纸状的褶皱。这些折纸状的褶皱在翅膀碰撞中起着至关重要的减震作用。当翅膀与障碍物碰撞时,它会沿着褶皱塌陷并在一个冲程内弹回原位。碰撞因此得到抑制,有助于甲虫迅速恢复飞行。
甲虫仿生微型飞行机器人的设计
Phan和Park利用这种自然减震器的概念转移到一个重约18克的微型飞行机器人上。

图3. 微型飞行机器人的机翼可以被动折叠并迅速展开。
他们在飞行机器人上搭建了一个被动折叠的机翼(图3A)。机翼可以在前缘中跨处的弯曲接头(BJ)处被动折叠并快速展开(7毫秒内),这类似于甲虫后翅的MJ(图3 B-E)。
由于静脉的排列,它可以在BJ处执行两种折叠模式,即纵向折叠和横向折叠。纵向褶皱是由0.2毫米超弹性镍钛合金细线制成,可防止拍打运动期间出现褶皱。同时,通过BJ的屈曲形成横向折叠。折叠过程中储存的能量可以使翼尖快速展开(图3 D-E)。
当机器人飞行期间飞行中的机翼尖端碰到障碍物,机翼会沿着这些金属丝稍微折叠一点,从而将碰撞力降低了三分之二。碰撞后,弹性线中存储的变形能量再次释放,使机翼在短时间内迅速展开,可以在短暂旋转后稳定地继续飞行而不会受到任何损坏(图3 F-J)。
Phan和Park通过制造微型折叠机翼并将其集成到甲虫仿生的微型飞行机器人中,不仅概念验证了甲虫的后翅设计原理,而且展示了机翼的展开能力以及碰到障碍物后的弹性。相信这项工作必将激发人们对这种空中微型飞行机器人的机翼机制的兴趣。
同期《Science》刊登了吉林大学孙霁宇教授评论文章,值得指出的是,开发可部署的微型飞行器仍然面临极大的挑战,特别是飞行器机翼的抗疲劳性有待考证和提升,以增加总体机翼强度和飞行稳定性。对于低雷诺数的微型飞行器,未来的研究需要关注非定常空气动力学问题,解决微型飞行器组件的制造技术(如机翼和机身)和非定常空气动力学条件下的飞行控制。
参考文献:Hoang Vu Phan, Hoon Cheol Park, Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science 370, 1214–1219 (2020). DOI: 10.1126/science.abd3285
原文链接:https://science.sciencemag.org/content/370/6521/1214https://science.sciencemag.org/content/370/6521/1165
编者按:本文转载自微信公众号:高分子科学前沿(ID:Polymer-science)


本文作者信息
高分子科学前沿(学术公众号)
邀请演讲广告、内容合作请点这里:寻求合作
咨询·服务