让机器人修理自己?东京大学“调教”出神技能 还能给自己加零件
虽然我们都希望机器人具有足够的耐用性,但其实及时、简单的维修,其实对于它们的流畅运作、延长使用寿命而言都非常关键。能不能让机器人实现“自己修理自己”呢?
在加拿大多伦多举行的Humanoids 2019会议上,日本东京大学的研究人员展示了一款能够自我修复的机器人。经过他们的“训练”,PR2(Personal Robot 2,有史以来最先进的研究机器人之一)可以通过拧紧自己的螺钉等方式,对自身进行简单的维修。

(图文无关)
机器人身上开始出现越来越多的仿人关节,也意味着要铆更多的螺丝钉,这往往会耗掉维护人员不少精力。为简化起见,研究人员向机器人提供了CAD数据,以准确告知机器人所有螺钉的位置。
研究人员指出,目前,尽管机器人可以理解其实际位置是否与数字模型不符(通过机器人连杆的姿态来判别),它却还无法直接自行检测出是否需要拧紧特定的螺钉,这表明实际中出了点问题。尽管如此,机器人仍能够不时地自主检查螺钉是否拧紧——它会知道自己的骨架有点散了,之后会利用CAD数据计算出要拧紧的螺丝的位置,然后上紧螺丝。或者它也可能依靠别人来告诉它具体哪些螺钉松了,根据触发器的信息,可以大致算出螺丝的位置。
另一个挑战是,与大多数人类一样,大多数机器人都不可能顺利地修理自己身上的每一处。在这种情况下,PR2可能需要其他机器人伙伴来帮忙处理它们自己没法操作的部分,就像人类互相帮助涂防晒霜一样。
根据螺钉的位置和方向,实际拧紧非常容易,也可能非常复杂。机器人可以利用手腕的不断旋转来拧紧螺钉,但是如果螺钉处于困难的位置(比如需要使用内六角扳手时),则必须在逐渐拧紧螺钉时必须一遍又一遍地抓紧工具。不过,设计人员倒是把机器人的手臂限制去除了,它可以轻松地拧紧自己背上的螺钉。
PR 2机器人配备了ROS和其他开放软件模块,并且能够自主导航并处理各种对象。它的长度为66.8厘米,宽度为66.8厘米,高度为165厘米(延伸了伸缩脊柱),有两条手臂,每条手臂七个关节,手臂末端是一个可以张合的夹爪。PR2依靠底部的四个轮子移动,在头部、胸部、肘部、夹爪上分别安装有高分辨率摄像头、激光测距仪、惯性测量单元、触觉传感器等丰富的传感设备。另外,这台500磅(226.8千克)的机器人装有32个有刷直流电动机和1.3 kWh锂离子电池组,可持续运行2小时。
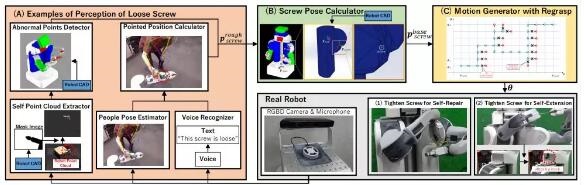
(上图说明了拧紧螺钉系统的操作原理 图源:University of Tokyo)
广角和窄角立体摄像机以及多个传感器可以帮助机器人精确地执行不同的任务。它强大的硬件和软件系统,则使它能够进行诸如清理桌子、折叠毛巾以及从冰箱中获取饮料之类的复杂任务。
利用该技能,该机器人还能够给自己增加诸如钩子之类的配件和硬件。比如在一个实验中,研究人员教了一个PR2机器人将钩子钩在它的一个肩膀上。机器人用一只手抓住钩子,另一只手抓住螺丝刀。研究人员通过将一个手提袋挂在钩子上来对其进行测试。好聪明的机器人!
研究人员解释说,PR2的设计经过精心设计,在肩膀(或技术上来说,在脖子上)和头部都有固定点,事实证明它可以通过操纵器达到这些固定点,从而可以对其进行修改。

(上图说明了机器人“自我扩展”的案例 图源:University of Tokyo)
这项研究由东京大学的研究人员Takayuki Murooka、Kei Okada和Masayuki Inaba共同进行,成果发表在《IEEE Spectrum》上。


广告、内容合作请点这里:寻求合作
咨询·服务